CNN(Convolutional Neural Networks)
- 기존 이미지를 학습할 때는 이미지의 형상을 고려하지 않고 raw data를 직접 처리하여 많은 학습 데이터가 필요하고, 학습시간이 많이 필요하였다. CNN은 이미지 공간정보를 유지한채 학습을 하는 모델이다.
- Convolution Layer와 Pooling Layer를 여러 겹 쌓는 형태로 구성된다.
- 인반적인 CNN은 마지막 단에는 분류를 위한 Fully connected Layer가 추가된다.
- 최근에는 뒷단에 있는 Fully connected Layer를 줄이는 추세이다. 이러한 이유는 모델의 parameter가 늘어날 수록 generalization performance가 떨어지기 때문에 parameter를 줄이기 위해 Fully connected Layer줄인다.
Convolution
- Convolution 연산은 기존 MLP(Fully connected)의 연산과 다르게 커널(filter)을 입력벡터 상에서 움직여가면서 선형 모델과 합성함수가 적용되는 구조이다.
- 커널(filter)이 고정된 크기이기 때문에 파라미터 크기를 줄일 수 있다.
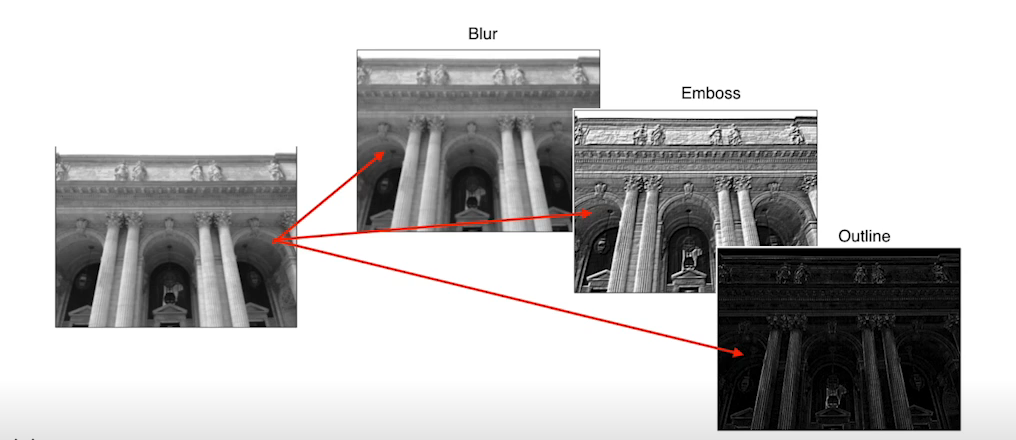
- 2D Convolution을 한다는말은 필터를 이미지에 찍는다고 생가하면 된다. 위의 사진처럼 필터에 따라 출력이 다양하게 나올 수 있다. 예를들어 3 * 3의 filter를 사용하고 각각의 값에 1/9 이들어가 있다면 평균이 출력될 것이므로 블러처리된 출력을 얻을 수 있다.
convolution 연산 이해
- Convolution 연산의 수학적 의미는 신호(g)를 커널(f)을 이용해 국소적으로 증폭 또는 감소 시켜 정보를 추출 또는 필터링하는 것이다.
continuous
\[[f*g]=\int_{ℝ^d}f(z)g(x-z)dz=\int_{ℝ^d}f(x - z)g(z)dz=[g*f](x)\]discrete
\[[f*g](i)=\sum_{a\in ℤ^d}f(a)g(i-a)= \sum_{a\in ℤ^d}f(i-a)g(a)=[g*f](i)\]- 커널(filter)은 정의역 내에서 움직여도 변하지 않고(Translation invariant) 주어진 신호에 국소적으로 적용한다.
- 간단하게 말하면 2D Convolution을 한다는말은 필터를 이미지에 찍어 값을 누적한다고 생각하면 된다. 아래 사진처럼 필터에 따라 출력이 다양하게 나올 수 있다. 예를들어 3 * 3의 filter를 사용하고 각각의 값에 1/9 이 들어가 있다면 평균이 출력될 것이므로 블러처리된 출력을 얻을 수 있다
다양한 차원에서의 Convolution
1D-conv
\[[f*g](i)=\sum_{p=1}^d f(p)g(i+p)\]2D-conv
\[[f*g](i,j)=\sum_{p,q} f(p,q)g(i+p, j+q)\]3D-conv
\[[f*g](i,j,k)=\sum_{p,q,r} f(p,q,r)g(i+p,j+q,k+r)\]커널(filter)이 위치에 따라 변화되지 않는다.
Convolution 출력
- 출력의 높이 OH = (H + 2P - FH)/S + 1
- 출력의 폭 OW = (W + 2P - FW)/S + 1
- P : 패딩 사이즈
- S : Stride 사이즈
- FH, FW : 필터의 높이, 폭
- H, W : 입력의 높이, 폭
stride
input에서 커널(filter)이 움직이는 칸수를 말한다. 2D이상의 Convolution에서는 각 dim에 적용할 stride를 지정할 수 있다.
padding
convolution layer에서 Filter와 stride의 작용으로 Feature Map의 크기는 입력데이터보다 작아지게 된다. 이를 방지하기 위해 padding 기법을 사용한다. 입력데이터의 외각에 지정된 픽셀만큼 특정 값을 채워넣는것을 말한다.
3 x 3 filter를 썻을 때 padding이 없는 경우와 padding size가 1인 경우를 비교한 모습이다.
이처럼 원하는 출력을 padding과 stride를 주는것으로 만들 수 있다.
pooling 레이어
Convolution Layer의 출력 데이터를 입력으로 받아서 출력의 크기를 줄이거나 특정 데이터를 강조하는 용도로 사용된다.
- Max Pooling
- 입력데이터에서 Pooling size만큼 씩 나누어 최대값만 사용한다.
- Average Pooling
- 입력데이터에서 Pooling size만큼 씩 나누어 평균값을 사용한다.
- Min Pooling
- 입력데이터에서 Pooling size만큼 씩 나누어 최소값만 사용한다.
보통 Pooling크기와 Stride를 같은 크기로 처리해 각 원소가 한번씩만 처리되도록 한다.
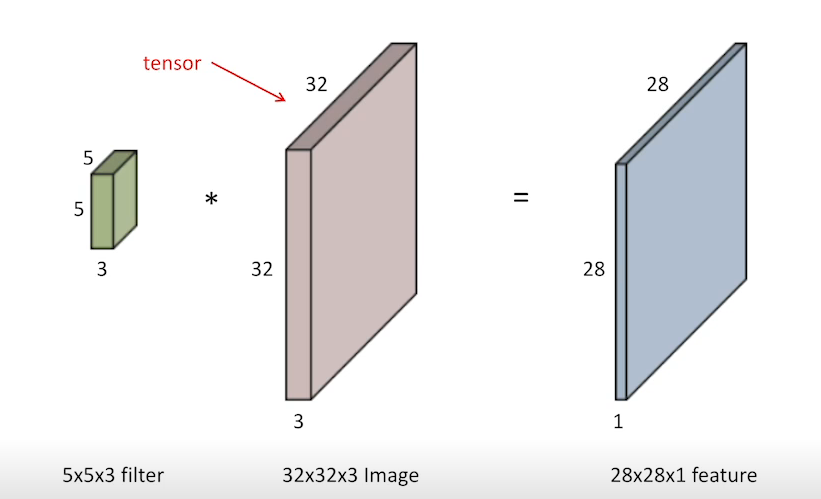
채널
- 컬러 사진 데이터의 shape는 (H, W, 3)으로 표현된다(R, G, B). 흑백의 경우 (H, W, 1)로 표현되는데 가장 마지막에 있는 것이 채널이다.
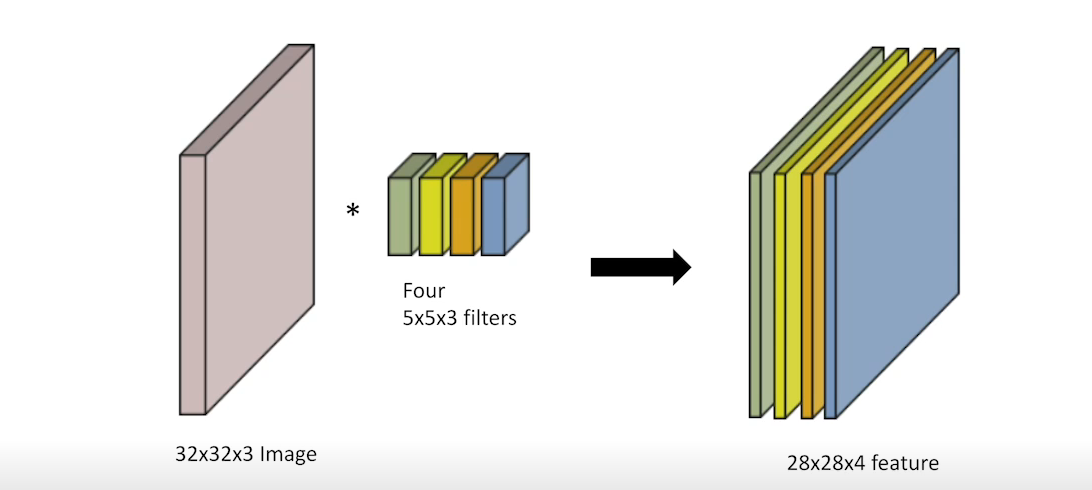
- 채널이 여러개인 2차원 입력의 경우 2차원 Convolution을 채널 개수만큼 적용한다고 생각하면 된다.
- 사용한 필터의 개수만큼 출력이 나오기 때문에 여러개의 필터를 사용하면 출력의 채널은 필터의 개수와 같게 나온다.
convolution 연산의 역전파
- Convolution연산은 필터가 모든 입력데이터에 공통으로 적용되기 때문에 역전파를 계산할 때도 Convolution 연산이 나온다.
Parameter
특정 모델을 보고 각 Layer별로, 그리고 전체 모델에서 파라미터가 몇개정도 필요한지 아는것이 중요하다.
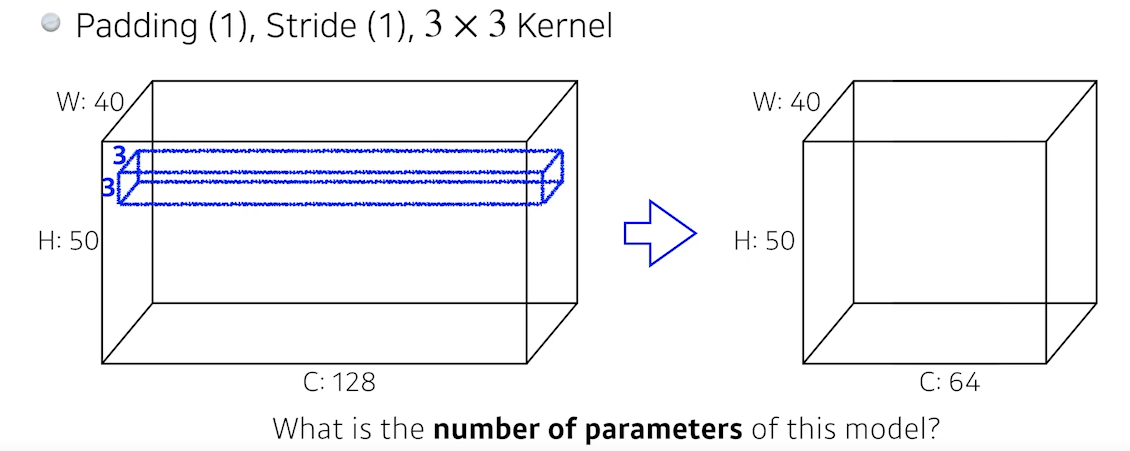
3 x 3 x 128의 필터를 사용하면 1겹의 feature map이 나오므로 64채널을 가진 feature map을 가지려면 이러한 필터가 64개 있어야 한다. 따라서 parameter 수는 3 x 3 x 128 x 64개 이다.
특정 모델을 보았을 때 파라미터가 몇개가 되는지 아는것은 중요하다. 직접손으로 한번 계산해보자
Dense Layer와 Parameter 개수
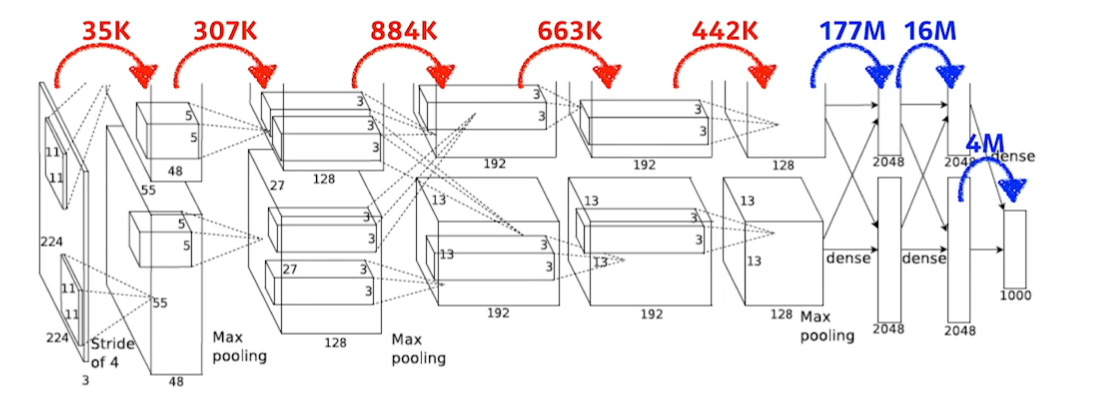
- AlexNet의 각 Layer별 파라미터 수를 계산하면 위의 그림과 같다. parameter숫자가 dense layer로 넘어가면서 급격하게 늘어나는것을 볼 수 있다. 이러한 이유는 convolution은 하나의 필터가 모든 위치에 적용되지만 Fully connected Layer는 input의 개수 * output의 개수만큼의 Parameter가 필요하기 때문이다.
- 뉴럴네트워크의 성능을 올리기 위해서 Parameter를 줄이는게 중요한데 대부분 Parameter가 들어가 있기 때문에 뒷단의 Fully Connected Layer를 최대한 줄이고 앞단의 convolution layer를 최대한 깊게 쌓으려고 하는것이 트랜드이다.
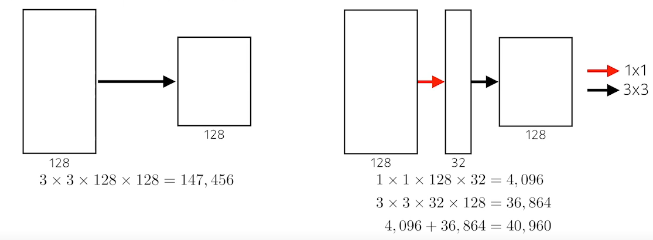
1 x 1 Convolution
- 채널을 줄이는 역할을 한다. 이는 곧 파라미터 수를 줄일 수 있음을 의미한다.
- CNN의 깊이는 늘리면서 파리미터는 줄일 수 있다.
대표 : bottleneck architecture
![CNN7]()
CNN 모델들
AlexNet
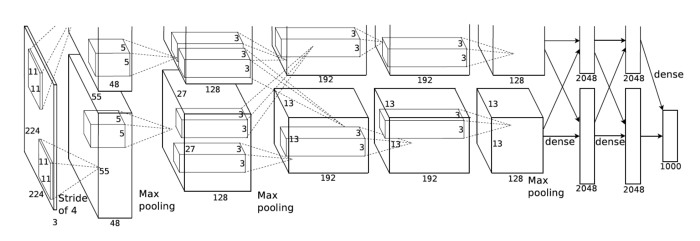
- 5개의 Convolution Layers와 3개의 Dense Layers를 가지는 모델이다.
- 첫 입력의 11 x 11의 필터를 사용하는데 최근은 7 x 7을 거의 벗어나지 않는다. VGGNET에서 3 x 3을 쓴 이유와 같은 이유이다.
- ReLU를 사용하였다.
- GPU활용
- Local response normalization, Overlapping polling
- LRN : 어떤 입력 공간에서 response가 많이 나오는것을 죽이는것
- data augmentation
- Dropout
VGGNet
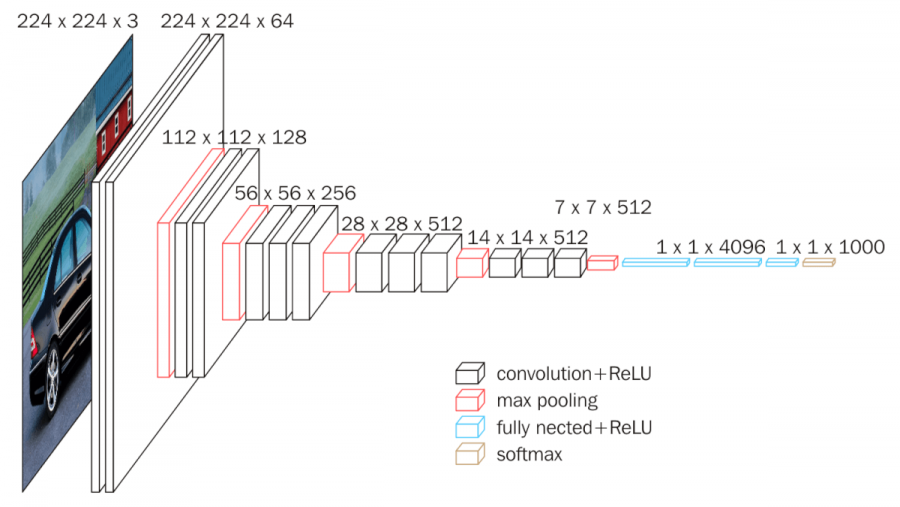
- 3 x 3 filter만 사용하였다.
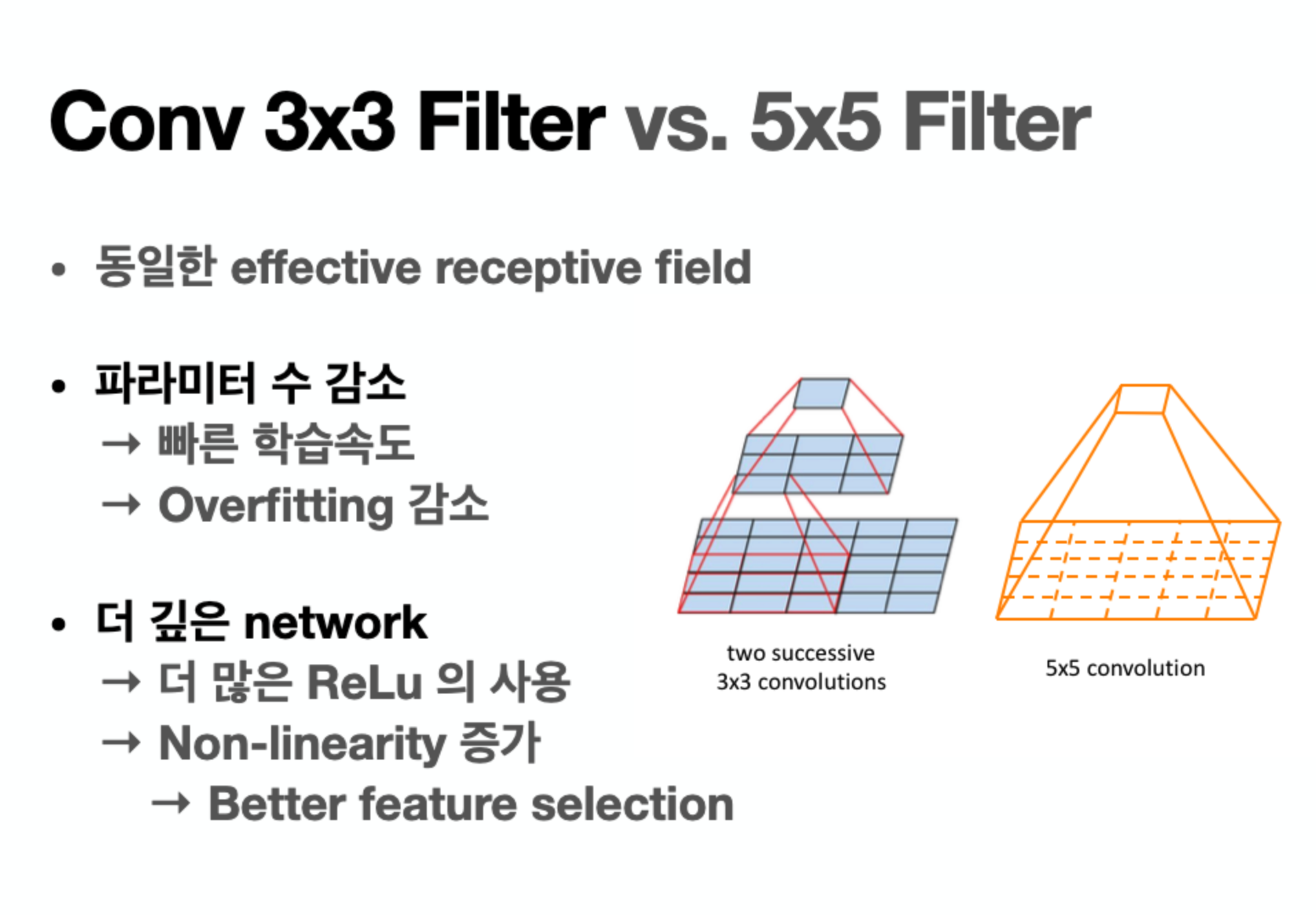
- filter가 커질수록 고려되는 input의 크기가 커진다. 이것을 receptive field라고 하는데 (filter size == receptive가 맞나?? TODO) 아래의 그림처럼 3 x 3을 두번 사용하면 5 x 5를 한번 사용하는 것보다 적은 parameter가 필요하지만 receptive filed는 같다.
- receptive: 출력 레이어의 뉴런 하나에 영향을 미치는 입력 뉴런들의 공간 크기
![CNN10]()
GoogLeNet
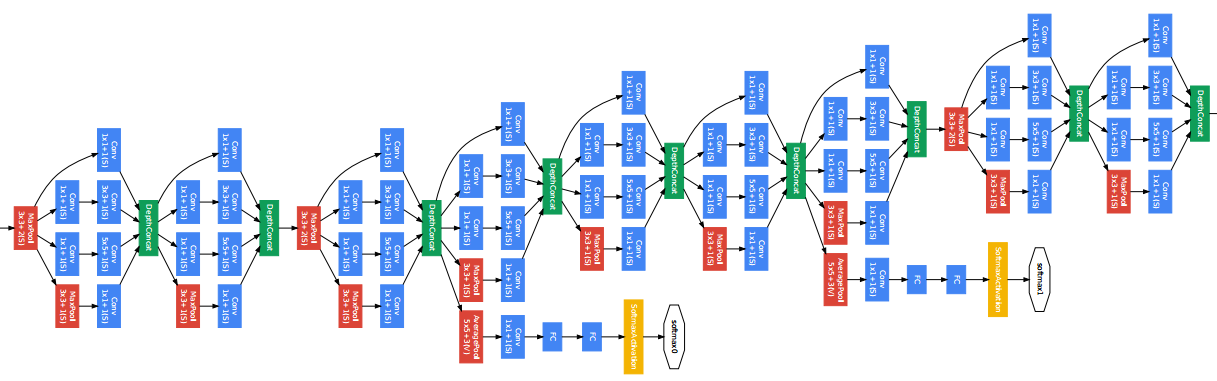
- 여러 네트워크가 들어가 있는 이러한 구조를 NiN(Network in Network)구조라고 한다.
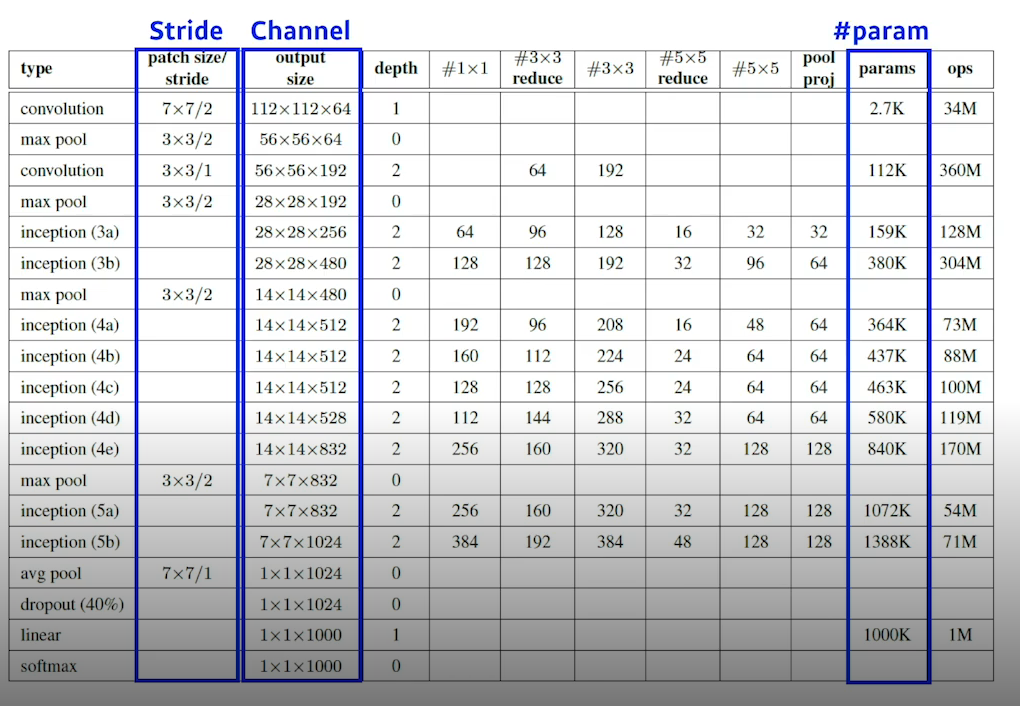
- GoogLeNet은 22개의 Layer로 구성되어있고
- GooglLeNet은 NiN구조와 Inception Block을 잘 이용하였다.
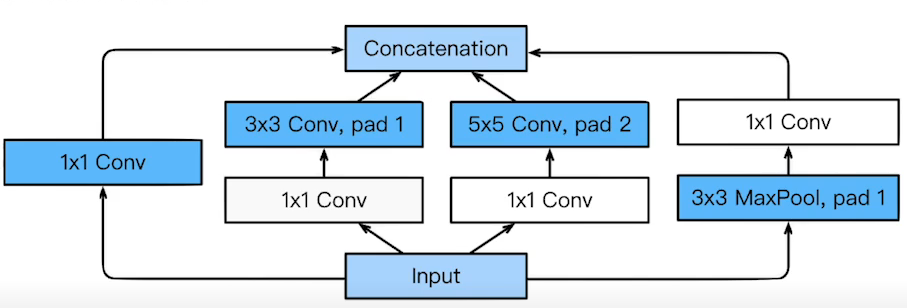
- inception Block은 여러개의 receptive field를 가지는 필터를 거쳐 어러개의 response를 Concatenation한다. 이러한 구조 중간에 1 x 1 Convolution을 추가해 Parameter를 줄였다.
ResNet
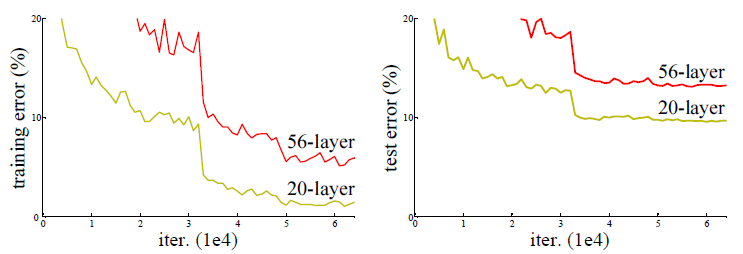
- ResNet논문에는 위와 같은 그래프가 있는데 이는 기존의 방식대로는 어느 정도 네트워크가 커지면 depth가 더 낮은 모델보다 학습이 되지 않는다는 것을 보여준다.
- 위의 문제점을 해결하기 위해 ResNet은 identity map(Skip connection)을 추가하였다.
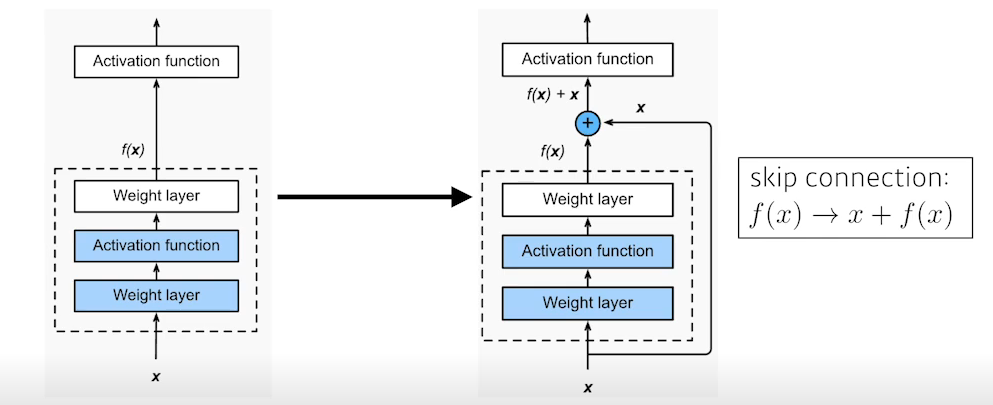
- 이러한 ResNet은 network를 더 deep하게 쌓을 수 있는 가능성을 열어주었다.
Dense Net
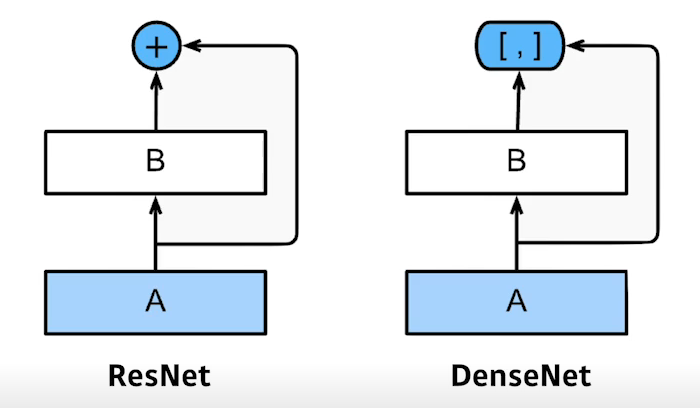
- Dense Net은 ResNet처럼 더하는 것이 아닌 concatenation하는 방법을 제시하였다.
- concatenate하면 채널이 점점 커지는데 깊이가 깊어지면 계속해서 기하급수적으로 커지게된다.
- 이런 문제를 사용하기 위해 1 x 1 Conv를 사용해 채널을 줄인다.
semantic Segmentation
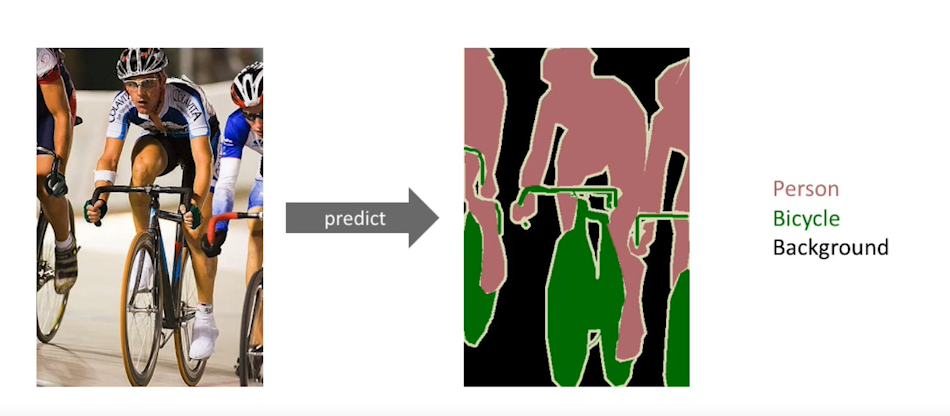
이미지의 픽셀이 어떤 label에 해당하는지 찾는 문제, 자율주행등에 사용된다.
Fully Convolutional Network
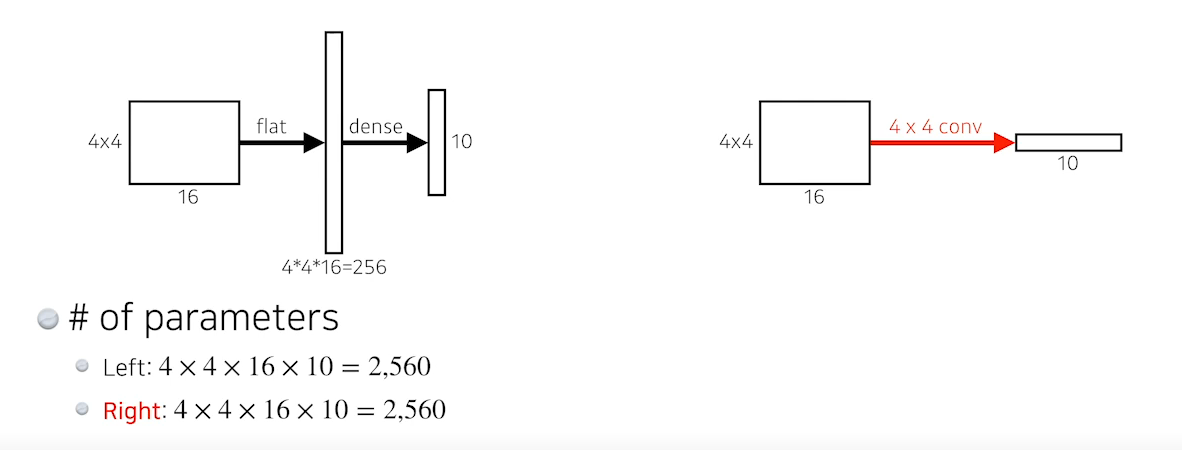
- Dense Layer를 없애 output Layer도 Conv Layer를 사용하는 네트워크를 말한다. 이렇게 Dense Layer를 없애는것을 convolutionalization이라고 한다.
- parameter수가 줄지는 않는다(Fully connected가 하던것과 동일한 역할을 단순히 Conv 연산으로 바꾼것 뿐).
- 기존 Fully Connected 네트워크는 input의 size에 의존적이다. 하지만 Fully Convolutional 네트워크는 입력의 크기와 상관없이 동일한 Filter를 사용하기 때문에 작동한다.
- 하지만 입력의 크기가 줄어들면 Output의 크기도 줄어들기 때문에 원래의 size로 늘려주는 역할이 필요하다.
Deconvolution(conv transpose)
실제 Conv의 역연산은 아니지만 실제 모델을 설계할 때 Conv의 역 연산이라고 생각하면 편하다.
![Deconvolution]()
Detection
R-CNN
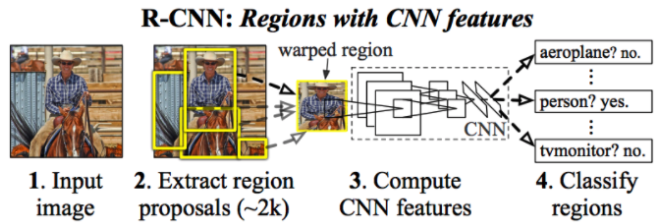
- 전체적인 프로세스는 위의 사진과 같다.
- Image입력
- Selective Serarch 알고리즘으로 regional proposal output약 2000개 추출
- CNN을 사용하기 위해 동일한 사이즈로 Warp
- 약 2000개의 warped된 이미지를 CNN모델에 넣는다.
- 각각의 결과에 대해 분류한다.
- region proposals은 물체가 있을것 같은곳을 찾는다. (Selective search 알고리즘)
- 이러한 R-CNN은 CNN을 2000번이나 수행해야한다.
SPPNet

- R-CNN과 비슷하나 하나의 이미지에 대해서 한번만 CNN을 수행하면 되도록 한 네트워크이다.
- Conv Layer와 FC layer사이에 있는 SSP는 입력에 상관없이 고정된 Feature map을 출력해 주기 때문에 R-CNN에서 Wrap하는 과정에서 발생되는 왜곡을 막을 수 있다.
- TODO : 동작 방식이 이해되지 않는다..?
Fast R-CNN
- 기존 SPPNet, R-CNN과 다르게 end-to-end 모델을 제시하여 학습을 간소화시키고 정확도와 성능 모두를 향상시킨 네트워크
Faster R-CNN
- bounding box를 뽑아내는 Region Proposal을 학습시키는것(RPN)
- Region Proposal Network
- RPN은 이미지의 특정 영역이 bounding박스로서 의미가 있는지 없는지를 찾는다.
- RPN을 학습시키기 위해 anchor boxes가 필요한데 이는 미리 정해둔 bounding box 크기를 말한다.
- 3개의 region size와 3개의 ratios를 나타낼 9개의 파라미터, bounding box를 얼마나 키우고 줄일지 결정하기 위한 4개의 파라미터, box가 유의미 한지를 나타내는 2개의 파라미터로 총 9 * (4+2)의 파라미터가 필요하다.
- Region Proposal Network
- 논문 리뷰 자료
YOLO(v1)
- Faster R-CNN에서는 Region Proposal 네트워크가 있었고 분류는 이 뒤의 네트워크가 처리하였는데 YOLO는 한번에 이런 작업을 진행한다.
- 이미지가 들어오면 S x S grid로 나눈다.
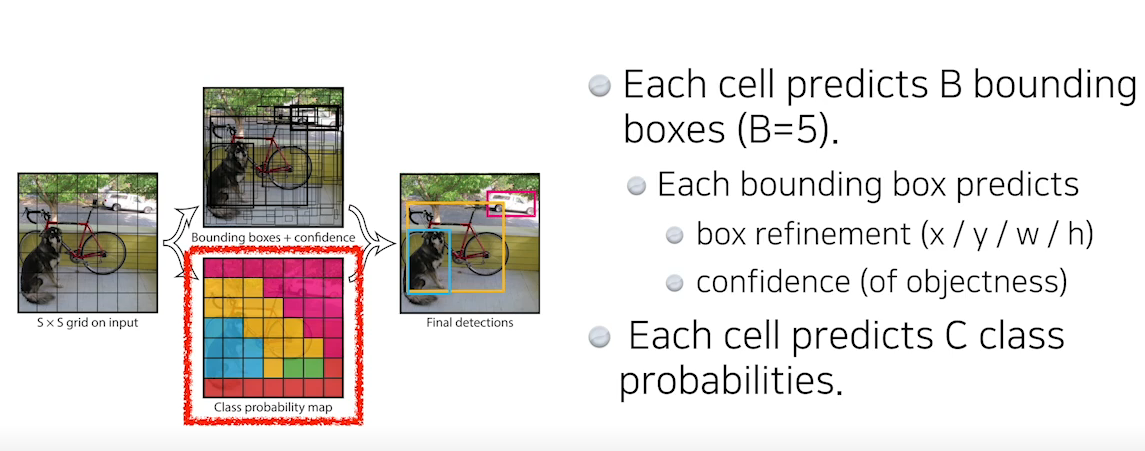
- grid Cell이 해당물체의 Bounding box와 해당 물체가 무엇인지를 같이 예측한다.
- 프로세스
- 이미지를 S x S grid로 나눈다.
- B개의 bounding box의 x, y, w, h와 유의미한 box인지를 찾고 동시에 해당 gird cell이 이 어느 Class에 속하는지 예측한다.
- S x S의 Grid에서 5개(x,y,w,h, confidence)의 offset을 가지는 B개의 bounding box를 C개의 클래스로 구분하기 때문에 총 S x S x (B * 5 + C)의 Tensor된다.
- YOLO(V1) 논문 리뷰